Giỏ hàng của bạn đang trống
Hướng dẫn Lập trình Hàm PID của PLC FX3U Mitsubishi
PID là một giải thuật thông dụng ứng dụng rất nhiều để điều khiển các thông số như: Tốc độ động cơ, Lực căng, áp suất, lưu lượng....
PLC FX3U tích hợp và hỗ trợ sẵn hàm PID, tuy nhiên việc sử dụng và ứng dụng trong thực tế còn chưa được phổ biến. KHANGTHINHTECH.VN xin hướng dẫn chi tiết hàm PID của PLC FX3U thông qua 1 mô hình trực quan: :"Điều khiển chính xác tốc độ động cơ"
1 - TỔNG QUAN MÔ HÌNH:
 Hình 1: Mô hình Điều khiển tốc độ động cơ bằng PID PLC FX3U
Hình 1: Mô hình Điều khiển tốc độ động cơ bằng PID PLC FX3U
| Thiết bị | Chức năng |
| HMI GOT2000 | - Hiển thị các thông số cài đặt và giám sát. -Cài đặt thông số điều khiển |
| PLC FX3U | - Đọc giá trị xung hồi tiếp từ Encoder, tính toán được tốc độ thực của động cơ bằng hàm SPD (Speed). - Điều khiển truyền thông với biến tần thông qua chuẩn (Inverter Communication của Mitsubishi) để điều khiển tốc độ động cơ. |
| Card FX3U-485-BD | - Giao tiếp với biến tần |
| Biến tần D700 | - Nhận lệnh từ PLC để điều khiển tốc độ động cơ |
| Động cơ | - Cơ cấu chấp hành |
| Encoder (1024ppr) | - Hồi tiếp tốc độ động cơ về PLC |
2 - CHƯƠNG TRÌNH HMI
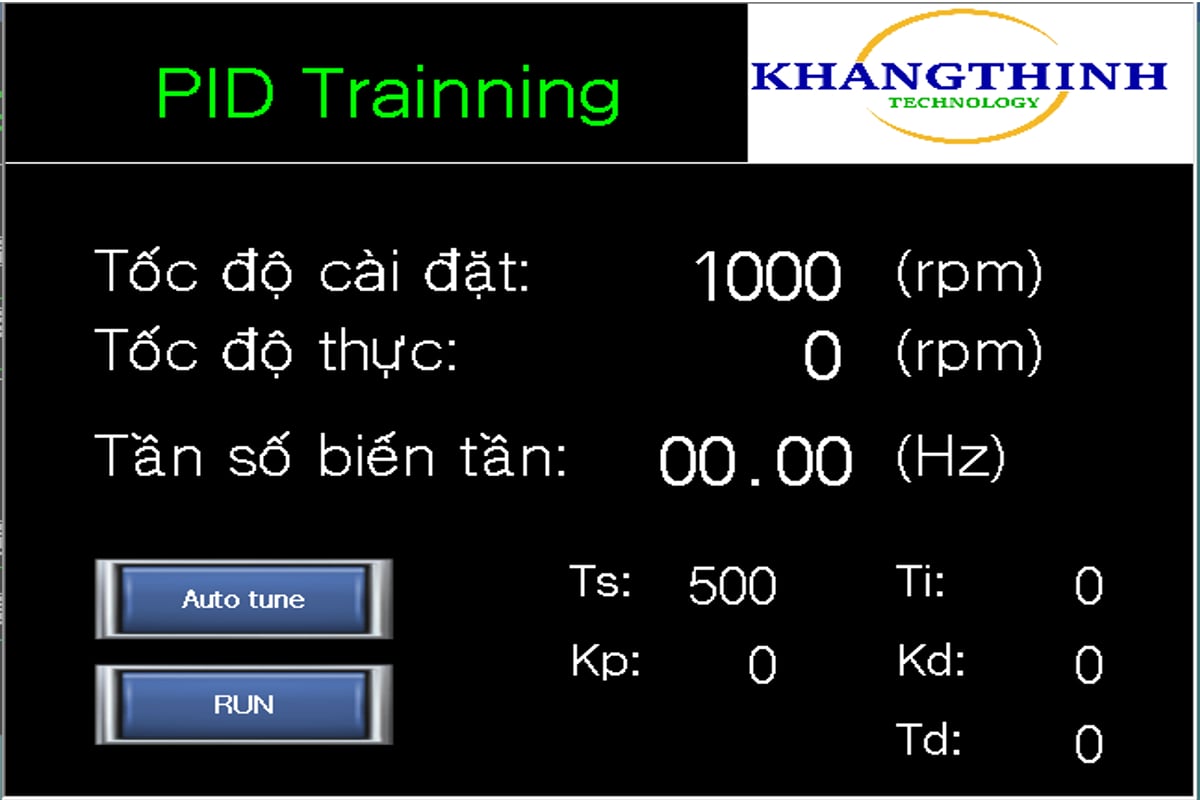
Hình 2: Giao diện HMI GOT2000 mô hình PID điều khiển động cơ
3 - CHƯƠNG TRÌNH PLC FX3U:
Hình 3: Chương trình PLC FX3U "Điều khiển tốc độ động cơ bằng PID"
3 - VIDEO HƯỚNG DẪN:
Khangthinhtech.vn chuyên:
- Cung cấp các giải pháp sửa chữa, thay thế, nâng cấp các loại máy công nghiệp, máy tự động hóa, máy gia công, máy sản xuất...
- Cung cấp các giải pháp, hệ thống tự động hóa...
- Sửa chữa, thay thế Servo, biến tần, viết chương trình PLC, HMI các hãng Mitsubishi, Siemens, Omron, Keyence, PANASONIC, Yaskawa...
Liên hệ: 0904199378 Call or Zalo Mr.HOÀNG
Bài viết mới nhất



